DDPG
Basic Terminology
评估策略的方法
在使用折扣因子的基础上,记
为策略
关于
首先,对于某一个状态
那么对于
策略梯度定理
策略梯度定理阐释了如何计算策略的梯度,即:
注意这里求梯度的时候是没有考虑
Actor-Critic 模式
在上面的评估函数中,可以发现,想要统计出
- Actor:负责根据策略梯度定理调整参数
的值来更新策略 - Critic:学习一个Q的函数来拟合当前的价值函数,即拟合
此时更新的公式变成了:
Off-policy Actor-critic模式
如果此时的行动策略
Actor-Critic模式的参数更新方式
首先定义
换句话说,这里的
那么下面就可以给出在线和离线 两种方式下的参数更新方法
On-Policy Deterministic Actor-Critic
在该模式下,参数
对于价值函数的拟合参数
对于当前策略的参数
Off-Policy Deterministic Actor-Critic
在离线的情况下,更新的公式是比较类似的,只是第一个TD-Error的更新变成了:
为什么这里不用加重要性采样了?
原文中有一段话:
However, because the deterministic
policy gradient removes the integral over actions, we can
avoid importance sampling in the actor; and by using Q-
learning, we can avoid importance sampling in the critic.
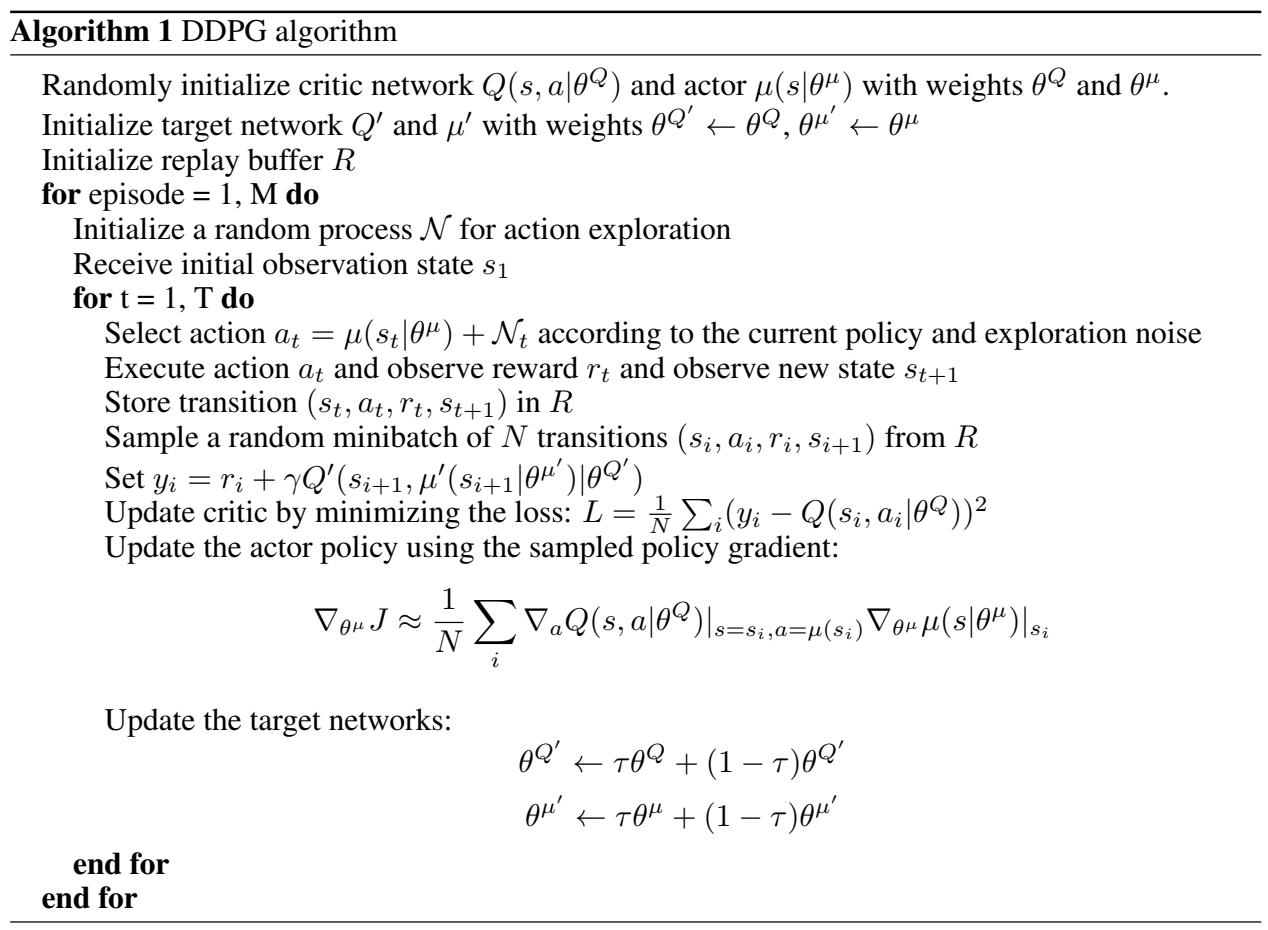
Algorithm
算法的结构如下图: