
3D基础-坐标系
齐次坐标系
参考文章:知乎
在二位笛卡尔坐标系中,一个点可以被表示为
齐次坐标系与笛卡尔坐标系的转换如下:
影像坐标系
参考文章:CSDN
在影像坐标系下面,有两套体系,一套是以像素为单位的
这里的像主点就是摄影中心在图像上的投影点
相机坐标系(Camera)
三维相机坐标系和二位影像坐标系之间的对应关系是,相机坐标系的原点在摄影中心,相机坐标系的
根据中心投影的特征,假设像素点
可以写成矩阵的形式:
接下来带入上面
那么这里面的
现实情况下,这个坐标系可能不是横平竖直的,可能是倾斜的,长下面这个样子: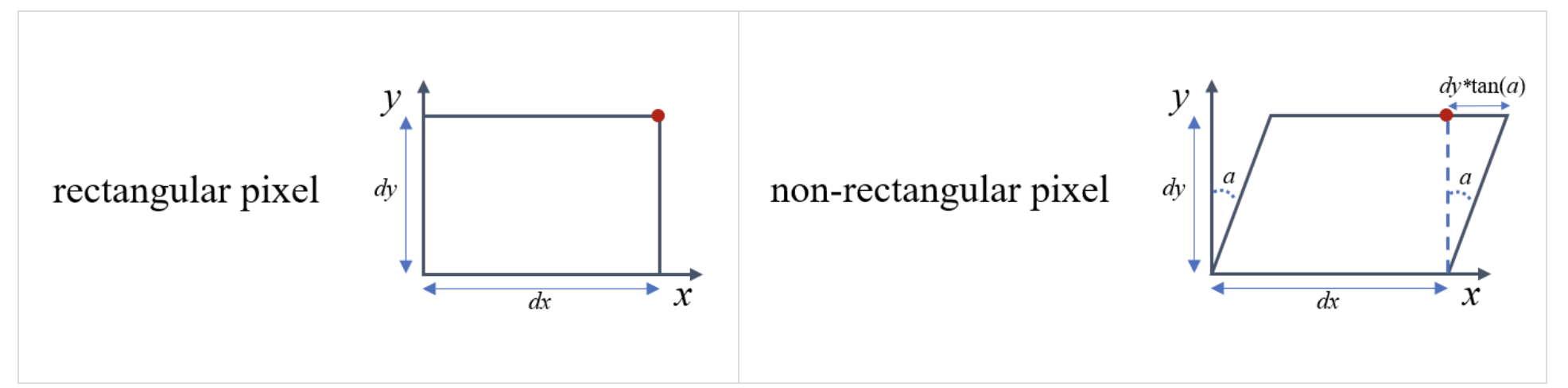
那么就需要在内参矩阵里面引入一个倾斜因子,此时的内参矩阵为:
这里的
所以最后到
世界坐标系
世界坐标系是以真实世界中的某个点作为原点,以真实世界的
定义一个三维的正交旋转矩阵
或者写成另一种形式:
而把
称为相机的外参矩阵
如果在齐次坐标系下,这个外参矩阵可以写为一个方阵:
在齐次坐标系下,相机坐标系到世界坐标系的转换可以被写为: